먼 말이 필요하겠수? 일단 돌아가는 환경 그림이라도 쭉 올려놔 보자. 나중에 참고할 부분이 있을지 모르지만
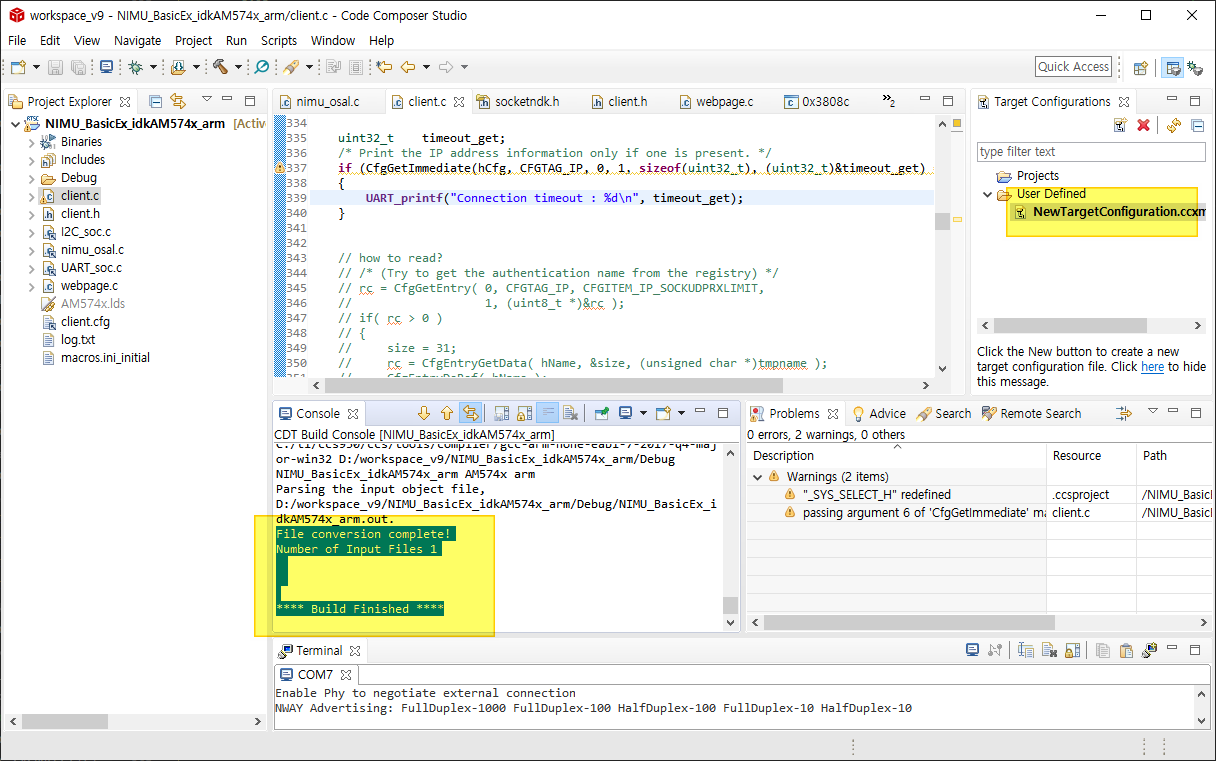
일단 프로젝트가 로드가 되면 아래와 같은 환경에서 컴파일을 할 수 있다.
참고로 동작 시키는 보드는 TMDSIDK574 - AM574x Industrial Development Kit (IDK) 엄청 비싼 보드네
보드 블럭도는 간단히 아래 그림과 같다.

제품 상세 페이지는 여기
https://www.ti.com/tool/TMDSIDK574
여기에 간단하게 JTAG 연결하고, 이더넷 포트 하나 연결하고 사용중..
그럼 컴파일로 들어가 보자. 직전 SDK 설치가 잘 되었으면 예제 하나 정도는 로딩이 될 듯
2021.08.31 - [IT/IoT | Hardware] - TI RTOS SDK 관련 정보들
TI RTOS SDK 관련 정보들
TI 칩셋은 거의 한글 정보가 없네 ㅠㅠ 암튼 TI RTOS 의 예제를 볼려고 하니 일단 TI SDK를 깔아야 하네. 엄청 방대하니 아래 페이지를 잘 읽어 보고 순서대로 해야 함 TI RTOS SDK 설치 https://software-dl.ti.
wiznxt.tistory.com
로딩이 성공되면 컴파일 버튼을 누를 수 있다. ㅋㅋ 이게 젤 중요 :)

에러가 발생하면 아래와 같이 나오니깐, 머 수정하고 다시 빌드

그럼, 이제 JTAG 이 연결된 디버거를 로딩한다.
자신이 가진 디버거에 따라 약간씩 다르겠지만 일단 컴파일러에서 지원하는 것은 비슷하겠지.
혹시몰라 아래 그림의 NewTargetConfiguration.ccxml 파일 구성 그림도 여기 첨부
XDS100v2 USB Debug Probe 사용하고 보드 이름에 맞게 IDK_AM574X 선택했다.

타겟 설정에서 디버거를 찾고 Launch Selected Configuration 을 클릭한다.

그럼 디버그 환경이 로딩된다. 보드의 코어가 많은 경우, 코어를 선택해 주고 connect 를 해주면 아래처럼 연결이 되고 상태값이 Suspended 로 표시된다.

이제 컴파일 빌드 성공한 바이너리 코드를 로드 및 다운로드 해 준다. 여기서는 로드 메뉴가 Run 메뉴에 있다.

그럼 컴파일된 환경의 빌드 파일을 찾아서 선택해 주면 끝! 디버그 환경이므로 Debug로 빌드한 놈을 선택해 줘야겠지

그럼 디버그를 통해 다운로드 되어 실행할 준비를 한다.

성공적으로 다운로드 되면 아래 화면 처럼 디버그를 할 수 있는 환경이 완성된다. Run을 수행할 수 있다.
코드 블럭이 나오면서 어디서 시작되는지 스텝별로 확인해 볼 수도 있고 머 그냥 Run 시켜도 되고

그냥 go run을 해 본다.
디버그에 상태를 보면 Running 으로 바뀌어져 있고, 코드에 포함되어 있는 터미널 창에 보니 디버그 코드난 출력 코드가 정상적으로 나오는 것을 보니 main() 함수 실행이 잘 되고 있다.

정리 끝!!
BJ.
'IT > IoT | Hardware' 카테고리의 다른 글
| RaspberryPi Pico 보드 C/C++ 빌드 with MSYS2 (0) | 2021.09.14 |
|---|---|
| TI RTOS NDK 네트워크 tcp connect 연결 timeout 값 조정하기 (2) | 2021.09.03 |
| TI RTOS SDK 관련 정보들 (1) | 2021.08.31 |
| Raspberry Pi Pico + Ethernet 연결하기 4 - 속도측정 라즈베리파이 피코 W5500 (0) | 2021.04.27 |
| AX1 - WIZnet 위즈네트 TCP 속도 측정 툴 (0) | 2021.04.27 |
